
Naughty Robotcat
For this mission, the potential use of animal therapy robots, such as the PARO therapeutic robot (http://www.parorobots.com/), was taken into consideration. However, in the context of supporting individuals in the work environment, the cat robot, referred to as "The Naughty Robocat," is envisioned to fulfill the role of a companion. Its purpose would be to alleviate stress and provide workers with a wholesome, enjoyable diversion from their tasks, thus contributing to a more relaxed and rejuvenating work environment through interactive engagement with the Robocat.
Aim
Robotic Arms Study
Therapeutic Robot
Human Robot Cooperation

Concept
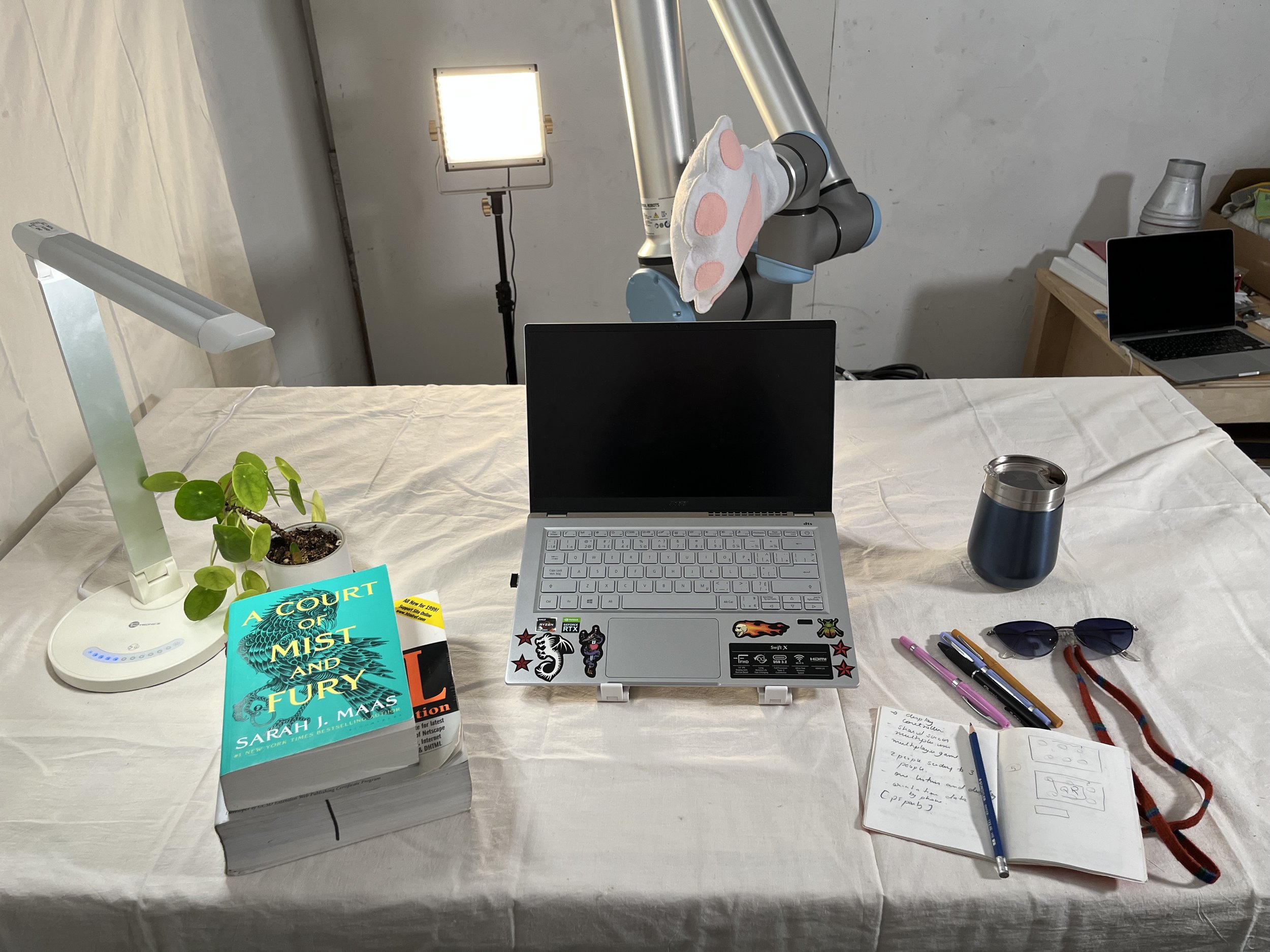
Considering the interactions involved, the Naughty Robocat performs in a collaborative manner with the Robocat itself and a touch sensor connected to Arduino. The project's current state necessitates the presence of one human participant in a simulated work environment, while other individuals behind the scenes oversee the preplanning of the Robocat's movements in two different robot states. These planned movements are then executed when the human participant in the work environment interacts with the touch sensor during their tasks.
In conclusion, the investigation explores the question: "Can an interactive and collaborative 'Naughty Robocat' be created by integrating a touch sensor connected to Arduino and Processing, incorporating a plush cat paw as an attachment to the robot, and incorporating a human participant in the work environment? Can all these elements synergistically combine to foster a fun, inviting, and somewhat stress-free work environment?"

Part 1. Attachment Design- Laser Cut Technique
In the initial phase of creating a robotic arm resembling a cat's paw, the focus was on altering its appearance. This process involved utilizing a laser cutting machine and an acrylic craft felt sheet to carefully craft a glove-shaped covering that accurately emulates the form of a cat's paw. The placement of this covering over the robotic arm allowed for a realistic representation. This study not only explored the design of such an attachment but also highlighted the significance of incorporating Laser cut Technique in interactive design.



Part 2. Interactive Interface – Arduino& Robot Cooporation
To enhance audience engagement, the decision was made to include a touch sensor for initiating the arm's movements. The Arduino was set up underneath the table, while the sensor remained hidden under the sheet.



Part 3. Scene Built-up - Photography Scene Practice
Ultimately, the objective was to simulate a real-life setting by creating a suitable environment and positioning a person in a workspace. Rather than employing a live cat, a robotic arm was utilized within this space. By incorporating familiar cat behavior and making subtle adjustments to the arm's appearance, the goal was to evoke a sense of owning a pet that closely emulates the real-life experience for humans. Expanding the range and diversity of movements may potentially lead to increased interactions between the robot and humans, surpassing those observed in conventional robot-human relationships.


Part 4. Robot Movement- Design Process
In the next phase, the focus shifted to modifying the movements of the robotic arm to emulate the desired actions. The goal was to replicate the natural behavior of a cat, encompassing playful and mischievous movements, like touching an object and swiftly knocking it over.
Slapping the cup
To create a surprising experience for people, a scenario was designed where individuals would be drinking water during work. Within the setup, a cup was placed on a sensor. Once triggered, the robotic arm would simulate the playful behavior of a cat by swiftly slapping the cup, effectively capturing people's attention.


Interrupting work
This scene depicts the robot's desire to catch people's attention. When the actor places the bottle on the surface, it triggers the robot to interact with the screen.

Patting a new toy
In this section, a new interesting situation was designed to create a companion plush that would accompany people. However, an unexpected twist emerged when the plush began to experience jealousy from the real animal cat present in the environment.

